
Science in Space April 2025
Humans have always been explorers, venturing by land and sea into unknown and uncharted places on Earth and, more recently, in space. Early adventurers often navigated by the Sun and stars, creating maps that made it easier for others to follow. Today, travelers on Earth have sophisticated technology to guide them.
Navigation in space, including for missions to explore the Moon and Mars, remains more of a challenge. Research on the International Space Station is helping NASA scientists improve navigation tools and processes for crewed spacecraft and remotely controlled or autonomous robots to help people boldly venture farther into space, successfully explore there, and safely return home.

A current investigation, NAVCOM, uses the space station's ISS Ham Radio program hardware to test software for a system that could shape future lunar navigation. The technology processes signals in the same way as global navigation satellite systems such as GPS, but while those rely on constellations of satellites, the NAVCOM radio equipment receives position and time information from ground stations and reference clocks.
The old made new
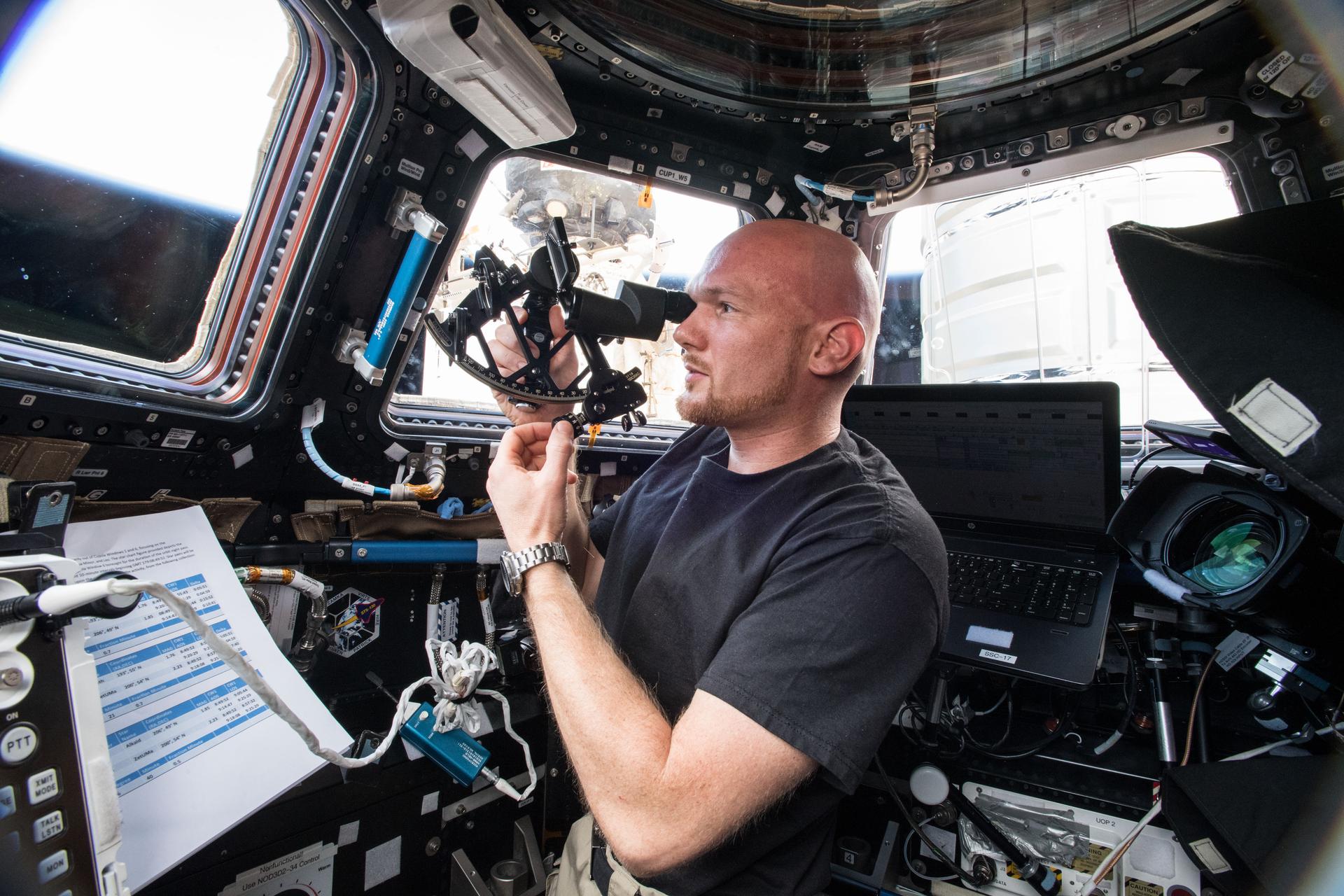
Sextant Navigation tested star-sighting from space using a hand-held sextant. These mechanical devices measure the angle between two objects, typically the Sun or other stars at night and the horizon. Sextants guided navigators on Earth for centuries and NASA's Gemini and Apollo missions demonstrated that they were useful in space as well, meaning they could provide emergency backup navigation for lunar missions. Researchers report that with minimal training and practice, crew members of different skill levels produced quality sightings through a station window and measurements improved with more use. The investigation identified several techniques for improving sightings, including refocusing between readings and adjusting the sight to the center of the window.
Navigating by neutron stars
The station's NICER instrument studies the nature and behavior of neutron stars, the densest objects in the universe. Some neutron stars, known as pulsars, emit beams of light that appear to pulse, sweeping across the sky as the stars rotate. Some of them pulse at rates as accurate as atomic clocks. As part of the NICER investigation, the Station Explorer for X-ray Timing and Navigation Technology or SEXTANT tested technology for using pulsars in GPS-like systems to navigate anywhere in the solar system. SEXTANT successfully completed a first in-space demonstration of this technology in 2017. In 2018, researchers reported that real-time, autonomous X-ray pulsar navigation is clearly feasible and they plan further experiments to fine tune and modify the technology.
Robot navigation
Crews on future space exploration missions need efficient and safe ways to handle cargo and to move and assemble structures on the surface of the Moon or Mars. Robots are promising tools for these functions but must be able to navigate their surroundings, whether autonomously or via remote control, often in proximity with other robots and within the confines of a spacecraft. Several investigations have focused on improving navigation by robotic helpers.

The SPHERES investigation tested autonomous rendezvous and docking maneuvers with three spherical free-flying robots on the station. Researchers reported development of an approach to control how the robots navigate around obstacles and along a designated path, which could support their use in the future for satellite servicing, vehicle assembly, and spacecraft formation flying.

The station later gained three cube-shaped robots known as Astrobees. The ReSWARM experiments used them to test coordination of multiple robots with each other, cargo, and their environment. Results provide a base set of planning and control tools for robotic navigation in close proximity and outline important considerations for the design of future autonomous free-flyers.
Researchers also used the Astrobees to show that models to predict the robots' behavior could make it possible to maneuver one or two of them for carrying cargo. This finding suggests that robots can navigate around each other to perform tasks without a human present, which would increase their usefulness on future missions.
An investigation from ESA (European Space Agency), Surface Avatar evaluated orbit-to-ground remote control of multiple robots. Crew members successfully navigated a four-legged robot, Bert, through a simulated Mars environment. Robots with legs rather than wheels could explore uneven lunar and planetary surfaces that are inaccessible to wheeled rovers. The German Aerospace Center is developing Bert.





