
Eduard Fosch-Villaronga from eLaw - Center for Law and Digital Technologies, together with Hadassah Drukarch and Carlos Calleja, explore how compliance tools could be used as data generators for policy purposes to optimize regulatory frameworks for existing and emerging robot technologies.
As technology advances rapidly, the gap between the speed of policy development and technological change is becoming more prominent. This is particularly true in robotics, where current legislation often lags behind and fails to adequately frame robot technologies. This gap increases legal uncertainty and poses safety risks, as developers may not know which regulatory frameworks to follow. The resulting technology may thus perform poorly and lead to biases and discrimination.
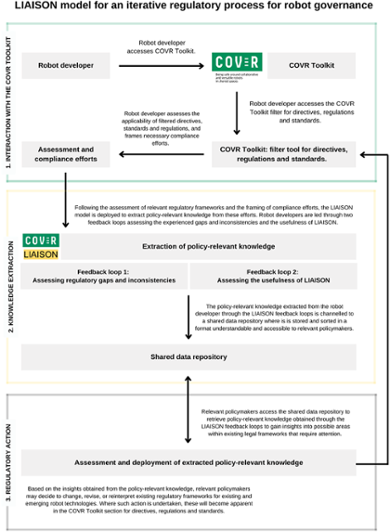
To address this issue, the LIAISON project, which stands for "Liaising robot development and policymaking," ideated an alignment model to bridge the gap between policy development and technological change. By designing an iterative regulatory process for robot governance, LIAISON aimed to solve the mismatch between the policy cycle's speed and that of technological and social change, particularly in robotics, where machines perform tasks either automatically or with a degree of autonomy.
In a peer-reviewed article published in Data & Policy, Eduard Fosch-Villaronga from eLaw - Center for Law and Digital Technologies, together with Hadassah Drukarch and Carlos Calleja, explored the issues and key findings of the LIAISON project. The article "An iterative regulatory process for robot governance" discussed how compliance tools could be used as data generators for policy purposes to optimize regulatory frameworks for existing and emerging robot technologies.
This article highlights the importance of legal and policy models that adequately frame robot technologies and explores the potential use of compliance tools to ensure that emerging robot technologies are safe, unbiased, and compliant with legal and policy frameworks.
The article is open-access and can be accessed through this link.
This project contributes to advancing the knowledge in the field of Science for Robot Policy, which Dr Eduard Fosch-Villaronga started at the eLaw Center for Law and Digital Technologies some time ago. Within that topic, Eduard received an ERC Starting Grant to work on SAFE & SOUND, a project he created that has the ambition to ideate practical ways to link robot experimental settings with the policy cycle to help overcome such information asymmetries between developers, users, and policymakers; give voice to end-users; and shed light on what needs regulatory attention for adequate robot governance.





