Professor Nathan Lepora
University of Bristol researchers developing robot hands that can operate with human dexterity have received financial backing from Advanced Research + Invention Agency (ARIA).
The grant will help the team utilise AI to co-design robotic hands with intelligent controllers that are optimised for dexterous manipulation.
This project on 'Democratising Co-Design of Hardware and Control for Robot Dexterity' is part of ARIA's £57M Robot Dexterity program that aims to transform robotic capabilities and unlock a step change in human productivity.
The award, granted to Professor Nathan Lepora at the University of Bristol and Dr Ed Johns at Imperial College London, will combine their expertise in creating dexterous robot hands and using AI to learn robot dexterity.
They will explore ways to identify the optimal design for next-generation robot dexterity, thereby tackling a fundamental challenge in robotics. Their overarching aim is to enable users to easily design their own robotic solutions for any given task, ultimately automating and democratising the co-design of robotic hardware and control.
Currently, when researchers try to design robots that optimise performance on a given task or set of tasks, they do so manually with no guarantee that the design is indeed optimal. Inspired by evolutionary biology, this team will develop software that allows users to specify a task and its constraints, then automatically generate and optimise novel manipulator designs and their controllers. They'll also create a 3D-printable robot platform for rapid prototyping and a centre for large-scale real-world testing.
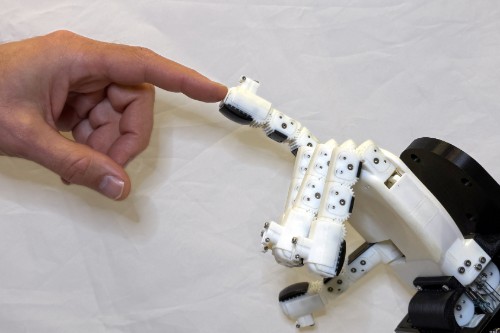
Professor Nathan Lepora said: "Robust manipulation with robotic hands would have revolutionary implications for industry and society, and is the key bottleneck in practical humanoid robots.
"It is now possible to 3D-print an entire robot hand including the tactile sensing for controlling the hand using technology developed in Bristol.
"By combining our expertise in rapidly making dexterous robot hands with Ed John's expertise in robot learning for highly-dexterous tasks, we aim to create co-designable dexterous robot hands with intelligent control that will be closer to having human-like manipulation capabilities."





