By rethinking how thin metal threads are woven into a flexible textile, EPFL researchers have created a lightweight fabric capable of lifting over 400 times its own weight. The work advances the development of wearables that provide physical assistance without mechanical bulk.
Most wearable robotic systems today rely on rigid components with limited comfort and social acceptance. Robotic elements that apply forces when activated can provide discreet mechanical assistance to human muscles, but it is extremely challenging for these actuators to achieve sufficient force and range of motion while remaining flexible enough to be integrated into garments.
Researchers in the Soft Transducers Lab (LMTS) in EPFL's School of Engineering have developed textile actuators using shape memory alloy (SMA) fibers interlaced in a periodic X pattern, dubbed X-Crossing geometry. When contracted by 50%, a 4.5-gram piece of fabric that integrates SMA fibers in the X-Crossing pattern can lift 1 kg. This work, led by Huapeng Zhang and LMTS head Herbert Shea, has been published in Science Advances.
Strength and flexibility from cooperating fibers
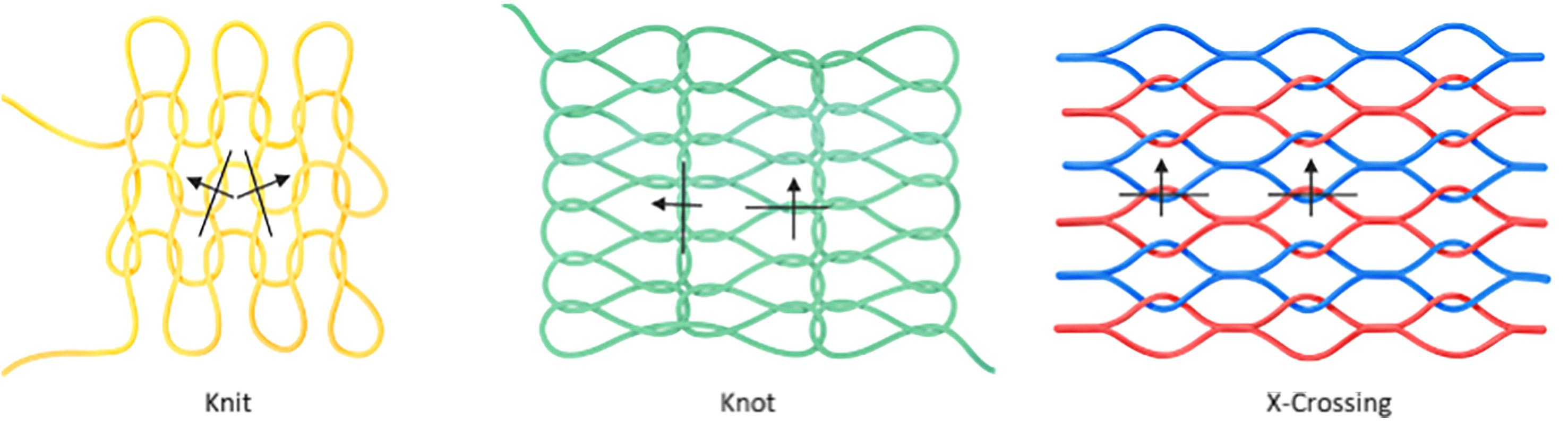
The team's working principle is based on how the thin SMA threads, made from a nickel-titanium alloy, shorten and stiffen when heated via an electrical current. While SMA fibers are powerful, their effectiveness in textiles has historically been limited by how they are interlaced. In standard knits or knots, the fibers loop around each other in different directions. When they contract, their forces often pull against one another, partially canceling each other out.
To overcome this limitation, the EPFL team developed the X-Crossing architecture. In this design, every fiber crossing is aligned precisely in the direction of the desired movement. Instead of the fibers fighting each other, they cooperate seamlessly. In addition to maximizing generated force, this alignment allows the resulting fabric to be stretched to 160% of its original length, making garments flexible and easy to put on.
"We realized that the orientation of fiber crossings plays a critical role in how forces add up inside a textile actuator," explains LMTS PhD student and first author Huapeng Zhang. "By aligning the crossings, we ensure that the forces generated at each intersection contribute constructively, rather than working against each other, resulting in a textile actuator that significantly outperform previous knitted or knotted designs."
Wearable assistance and compression
To demonstrate the potential for practical applications of their X-Crossing actuators, the team integrated them into two functional wearable prototypes. First, by mounting the textile on a mannequin's arm, they demonstrated a wearable sleeve for elbow bending assistance. The actuator lifted a 1 kg bag held in the mannequin's hand through a 30° range of motion in a smooth, controlled manner. In a second demonstration, the actuators were successfully used for on-body compression, which is needed for medical sleeves or athletic gear.
While textiles traditionally serve solely as passive apparel, the transition to fabrics that function as powerful actuators enables a new class of comfortable, unobtrusive, practical wearable robotics that provide support for daily activities.
Beyond the new architecture itself, the researchers also developed a mechanics model that captures how SMA fibers change stiffness with temperature and stress. Unlike previous simplified approaches, the model accounts for spatial stiffness variations within each fiber as it undergoes phase transitions, allowing scientists to predict how much force and contraction an actuator will produce under different loads, temperatures, and geometric designs.
Shea emphasizes that a key advantage of the X-Crossing design is its efficiency, which allows it to maintain compression pressure at zero energy cost.
"While textiles traditionally serve solely as passive apparel, the transition to fabrics that function as powerful actuators enables a new class of comfortable, unobtrusive, practical wearable robotics that provide support for daily activities," he says.





