For millennia, developing resilient crops relied on pollination by nature or humans-making the process long and often costly. Now, scientists from the Institute of Genetics and Developmental Biology (IGDB) of the Chinese Academy of Sciences have reimagined the pollination process by developing a new system that uses gene editing to create flowers that can be easily pollinated by AI-controlled robots working round the clock.
The system, known as Genome Editing with Artificial-Intelligence-based Robots (GEAIR), addresses a long-standing pollination hurdle: Hybrid breeding-which involves cross-pollination between different parent plants-produces higher-yielding, hardier crops. However, it relies on slow, costly manual labor to manage the pollination since recessed stigmas (female organs) and complex floral structures in key crops like tomatoes and soybeans have stymied robotic automation.
This breakthrough was detailed in the journal Cell on August 11.
"Human hands can navigate these flowers, but at a steep price," noted Prof. XU Cao, the corresponding author of the study.
In China alone, manual pollination eats up over 25% of fresh-market tomato breeding costs. In particular, emasculation-where male parts are removed to disable self-pollination-consumes 40% of that labor. Soybeans' tightly sealed flowers block natural cross-pollination, forcing such labor-intensive manual breeding that farmers still cannot access over 30% yield boost from hybrid vigor.
Drawing inspiration from the Green Revolution-when crops were reengineered for machinery-the team pioneered "crop-robot co-design" to create crops well-adapted to robotic technology. On the crop design side, they used CRISPR-Cas9, a precision gene-editing tool, to target B-class MADS-box genes such as GLO2 in tomatoes, which regulate flower development. The result is plants that are both male-sterile (eliminating the need for emasculation) and have protruding stigmas, making them easy for robots to access.
"We gave flowers a makeover for machines," Prof. XU said.
To complement the newly designed crops, GEAIR's custom robot is equipped with deep learning-based computer vision that identifies ready flowers and uses a precision arm to deposit pollen-matching human efficiency while working 24/7.
Its versatility expands beyond cross-pollination: It can aid self-pollination (potentially replacing bumblebees in controlled environments), collect pollen, and even select male-sterile or fertile plants by spotting exposed stigmas-obviating expensive DNA tests.
When paired with speed breeding (accelerating growth via extended light cycles) and de novo domestication (rapidly incorporating wild traits), GEAIR slashes breeding timelines. The team demonstrated this by developing new tomato lines with richer flavor and better stress tolerance-and the approach works for soybeans too, pointing to broad agricultural applications.
"GEAIR isn't just a tool-it's a paradigm shift," Prof. XU emphasized. "We're redesigning crops to unlock AI and robotics, and those technologies are supercharging our ability to create better crops, faster."
The study underscores a new era in agriculture: By co-engineering plants and machines, scientists are paving the way for faster, cheaper, and more sustainable crop development-a critical need as global demand for resilient food systems grows.
Crucially, the strategy proved transferable. Multiplex gene editing successfully recapitulated the male-sterile, exserted-stigma phenotype in soybean, a globally critical legume. This signals GEAIR's potential applicability across a wide range of major crops hindered by similar floral morphology bottlenecks in hybrid breeding.
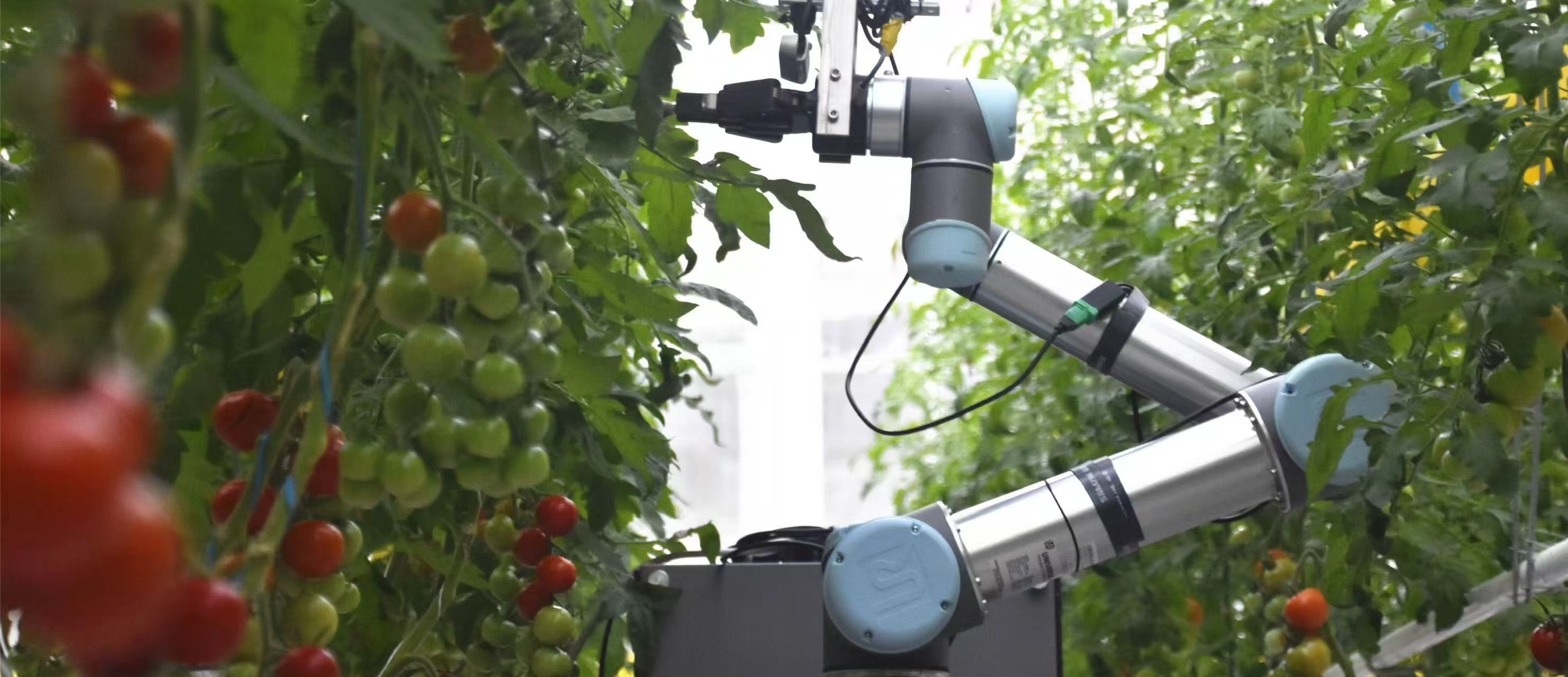
Robotic breeder GEAIR is working in greenhouse. (Image by IGDB)





