Abstract
A research team, affiliated with UNIST has unveiled a new type of artificial muscle that can seamlessly transition from soft and flexible to rigid and strong-much like rubber transforming into steel. When contracting, this innovative muscle can lift weights over 30 times its own weight, delivering energy output far surpassing that of human muscles.
Led by Professor Hoon Eui Jeong in the Department of Mechanical Engineering at UNIST, the research team announced that they have successfully created a soft artificial muscle capable of dynamically adjusting its stiffness.
While soft artificial muscles hold tremendous promise for applications in robotics, wearable devices, and medical assistive technologies that require human-like interaction, their widespread use has been limited by an inherent trade-off: they tend to be either highly flexible or capable of exerting significant force, but not both simultaneously.
Their breakthrough addresses this challenge by engineering a composite muscle that becomes stiff when bearing heavy loads and softens when it needs to contract. Remarkably, in its stiffened state, this tiny artificial muscle-weighing just 1.25 grams-can support up to 5 kilograms, roughly 4,000 times its own weight. When softened, it can stretch up to 12 times its original length.
During contraction, the muscle achieves a strain of 86.4%, more than double the approximately 40% strain typical of human muscles. Its work density reaches 1,150 kJ/m³, which is 30 times higher than that of human tissue. The work density indicates how much energy per unit volume the muscle can deliver, and achieving high values alongside high stretchability has been a longstanding challenge.
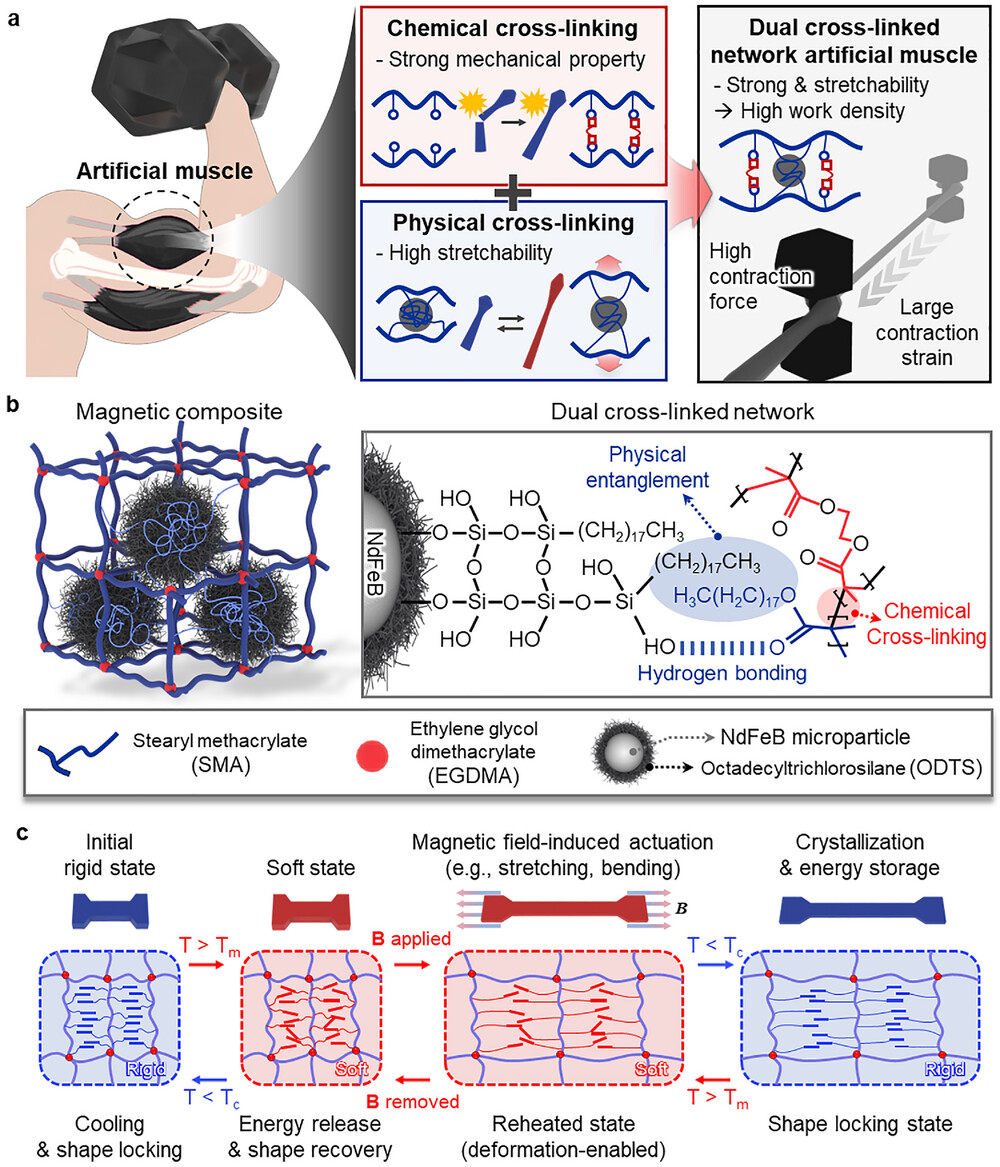 Figure 1. Schematic image, illustrating the dual cross-linking strategy and thermomechanical actuation mechanism of the magnetic artificial muscles.
Figure 1. Schematic image, illustrating the dual cross-linking strategy and thermomechanical actuation mechanism of the magnetic artificial muscles.
The key innovation lies in the dual cross-linked polymer network designed by the researchers. The muscle's chemical bonds-formed through covalent linkages-provide structural strength, while physical interactions-formed and broken by thermal stimuli-grant it exceptional flexibility. Additionally, surface-treated magnetic microparticles embedded within the muscle enable external magnetic fields to precisely control its movement, which was demonstrated in successful experiments lifting objects using magnetic actuation.
Professor Jeong explained, "This research overcomes the fundamental limitation where traditional artificial muscles are either highly stretchable but weak or strong but stiff. Our composite material can do both, opening the door to more versatile soft robots, wearable devices, and intuitive human-machine interfaces."
The study was published online in Advanced Functional Materials on September 7, and was supported by the National Research Foundation of Korea (NRF).
Journal Reference
Somi Kim, Sang-Woo Lee, Hyukjoo Kwon, et al., "Soft Magnetic Artificial Muscles with High Work Density and Actuation Strain via Dual Cross-Linking Design," Adv. Funct. Mater., (2025).





