Members of the Aqua Lab from the Society for the Study of Robotics — an official Tokyo Tech student club — have finished third at the Techno-Ocean 2021 underwater robotics contest held in Kobe City, Hyogo Prefecture on December 11, 2021. Team Tokyo Tech competed in the Autonomous Underwater Vehicle (AUV) Division of the competition with their robot Kurione.
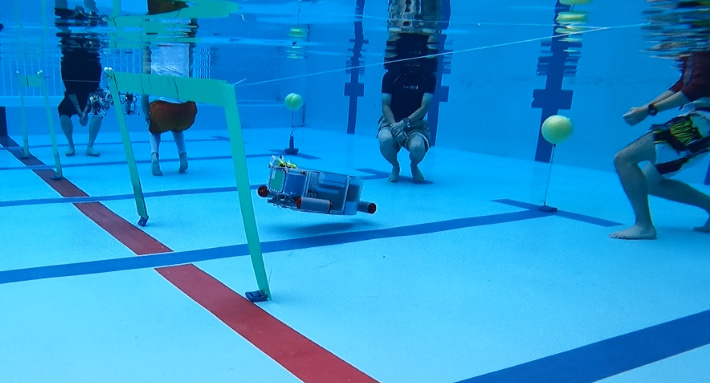
Aqua Lab's Kurione competing in the underwater contest
In the AUV division, robots must run autonomously underwater without remote control and make decisions based on sensor information. The contest is held in a 25-m pool, where robots are scored based on their ability to touch buoys and pass through gates set up in the water. In addition to points scored, the participants also competed through presentations that introduced the technology of the robot system, including its fault tolerance and portability.
As underwater robots do not have a stable ground to run on like land robots, operators must consider not only motion on a horizontal plane, but also vertical motion for diving and surfacing. Therefore, underwater robots are often equipped with thrust-generating devices, which often range from four to eight in number.
Kurione, the robot constructed by the Aqua Lab from the Society for the Study of Robotics, has a unique shape with three thrusters located at the apexes of its triangular shape (Fig. 1). Each thruster is a so-called azimuth thruster that allows free control of the direction of the thrust (Fig. 2). With this configuration, when all the thrusters are pointed horizontally as shown in Fig. 3, the robot can move forward, turn, and move sideways on a horizontal plane, much like a three-wheeled omnidirectional vehicle often used for land robots. On the other hand, if the thrusters are pointed in the vertical direction, the robot is configured like a helicopter or drone, and can perform diving and surfacing operations at high speed (Fig. 4). By having the ability to change modes, Aqua Lab were able to improve maintainability with fewer motors, while still achieving high kinematic performance. The result was a mechanism that works dynamically and a robot that is enjoyable to watch in action.
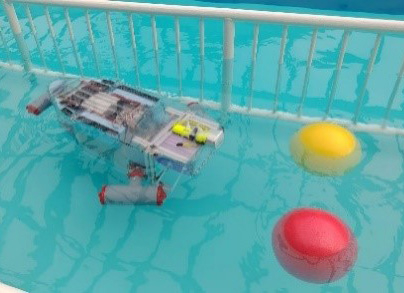
Fig. 1 Robot's unique shape and three thrusters
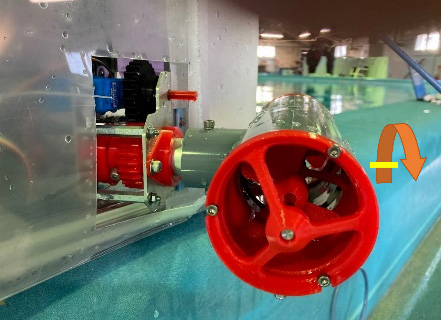
Fig. 2 Azimuth thrusters all rotate in direction of arrow
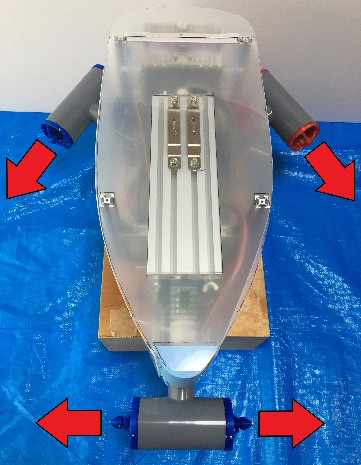
Fig. 3 Horizontal thruster positioning
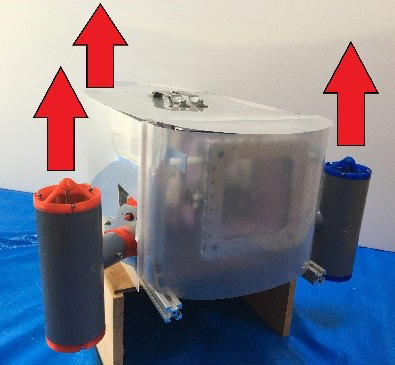
Fig. 4 Vertical thruster positioning
During the contest, Aqua Lab members attached acceleration sensors, water pressure sensors, and cameras to Kurione, and utilized the information gathered to achieve autonomous control. The team had difficulties making adjustments in the special underwater environment, but managed to pass through gates and score points. The team were highly evaluated for the originality of their robot and the level of skill required to build the machine and circuits. They finished in third place.
Comments from Aqua Lab member
Shohei Kamiguchi
1st-year, School of Engineering
This was the first time for us to control an autonomous underwater robot. Although there were times during the contest when we could not move the robot as intended, this was a valuable experience for us. We realized how difficult underwater robotics actually is. We also discovered certain issues that we would like to solve, so we hope to utilize the specialized knowledge that we will acquire at Tokyo Tech to enhance the adaptability and sophistication of the control of the robot.





