When it comes to grippers, we will most likely think of a mechanic device similar to a human hand. As a matter of fact, it is far from an easy task for a robotic system to grip objects, for they come in various sizes, shapes and quantities.
How can we design a universal gripper? The research team led by Prof. SONG Jizhou from the School of Aeronautics and Astronautics address this challenge by utilizing a simple shape memory polymer (SMP) block. As an emerging smart device, the SMP gripper can embed objects into its "body" and catch any object ranging from 1 micrometer to 1 meter in size with arbitrary shapes. Their research findings are published in the journal of Science Advances.
This universal SMP gripper works as follows. First, SMP becomes soft when exposed to the external stimulus, which facilitates the embedding of an object into the SMP gripper. Second, the SMP gripper returns back to its stiff state by removing the external stimulus so as to lock the object. Third, when the object is placed onto the target receiver, the SMP gripper will be activated by the external stimulus, which allows it to restore its initial state and release the "locked" object.
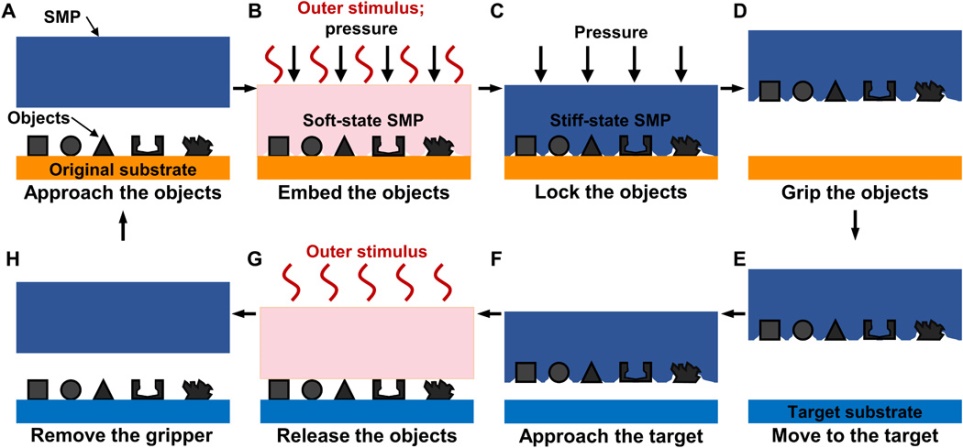
Schematic illustration of the gripping and releasing process of the universal SMP gripper
This "universal lock" can generate a massive grip force on typical 3D objects, including spheres, blocks, bolts, nuts, data pits and keys. More surprisingly, it can be glued onto any surface, be it smooth or rough, like a gecko.
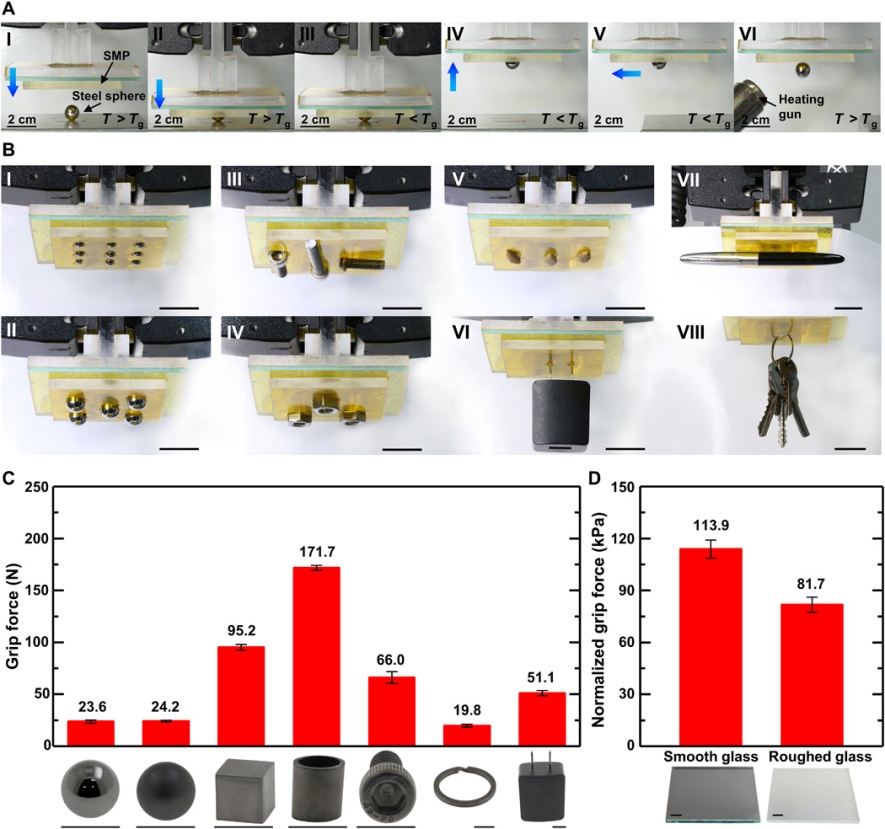
The grip force of the SMP gripper on different objects
It poses an enormous challenge when the SMP gripper is used to manipulate microscaled objects (smaller than 1 μm) due to their strong adhesive force. This problem can be addressed by applying a special material to the surface of the SMP gripper. Even an arbitrarily-shaped iron particle smaller than 75 μm or a SiO2 microsphere with a diameter of 10 μm can be gripped and released by the SMP gripper.
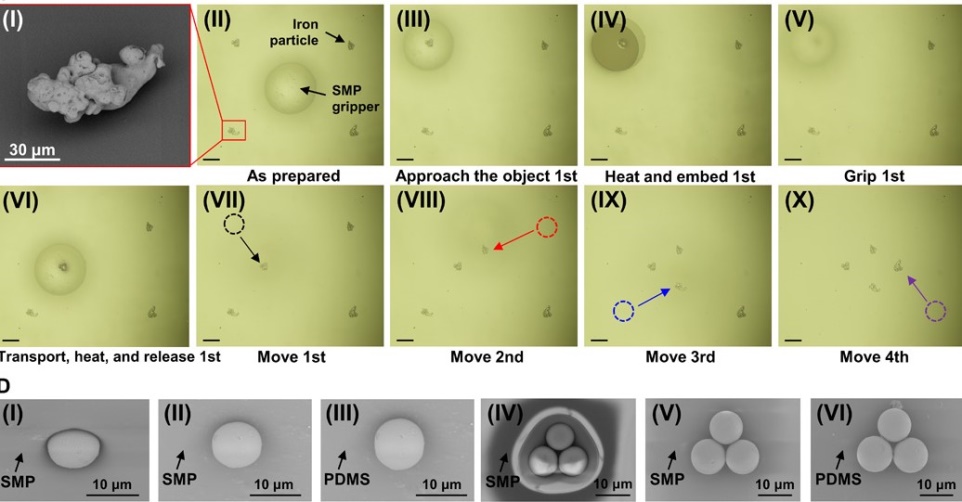
Manipulation of an arbitrarily-shaped iron particle and a SiO2 microsphere
This universal SMP gripper may open up new possibilities for the assembly and the development of unconventional functional devices such as spherical solar cells and vertically grown pillars, belts, rods, or wires.





