Adaptability explains why insects spread so widely and why they are the most abundant animal group on earth. Insects exhibit resilient and flexible locomotion, even with drastic changes in their body structure such as losing a limb.
A research group now understands more about adaptive locomotion in insects and the mechanisms underpinning it. This knowledge not only reveals intriguing information about the biology of insects, but it can also help to design more robust and resilient multi-legged robots that are able to adapt to similar physical damage.
The insect nervous system is comprised of approximately 105 to 106 neurons. Understanding the process behind this requires researchers to consider the role of the intrinsic neural circuits that influence the adaptions of insects under unfavorable circumstances and the sensory feedback mechanisms reflected in their body characteristics and physical interactions with the environment.
A research group comprising associate professor Dai Owaki from Tohoku University's Department of Robotics at the Graduate School of Engineering and associate professor Hitoshi Aonuma from the Research Institute of Electronic Science at Hokkaido University simultaneously recorded the leg movements and muscle activation of crickets, both before and after middle leg amputation.
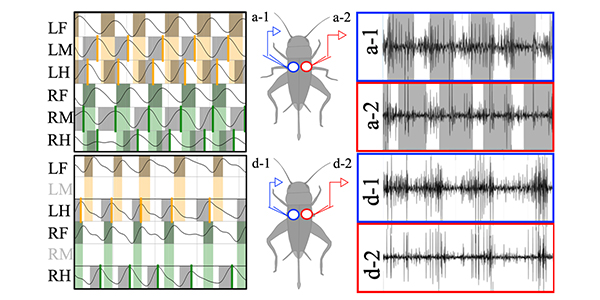
Their findings showed that the walking manner of crickets shifted from a tetrapod/tripod gait to a four-legged trot after the middle leg had been removed.
Electromyogram (EMG) analysis of the muscles at the base of the middle leg revealed that the muscles were active in opposite phases when walking. Activation timing of the middle leg muscles synchronized in phase when both legs had been removed, whereas the activation timing showed anti-phase synchronization for crickets with all of their legs.
The findings demonstrated two things. First, an intrinsic contralateral connection exists within the mesothoracic ganglion, which generates in-phase synchronization of muscle activation. Second, mechanoreceptive informational feedback from the campaniform seensilla of the legs overrides the centrally generated patterns, resulting in the anti-phase leg movements of a normal gait.
"Our results will pave the way for the further understand of leg coordination mechanisms in insect locomotion," said professor Dai Owaki. "It may also aid design principles for a decentralized controller that enables flexible and adaptive walking in an insect-like-six-legged robot."
- Publication Details:
Title: Leg amputation modifies coordinated activation of the middle leg muscles in the cricket Gryllus bimaculatus
Authors: Dai Owaki, Hitoshi Aonuma, Yasuhiro Sugimoto, and Akio Ishiguro
Journal: Scientific Reports





