When assessing the ripeness of fruit, sight and smell can tell you a lot, but the best indicator is often how the fruit feels.
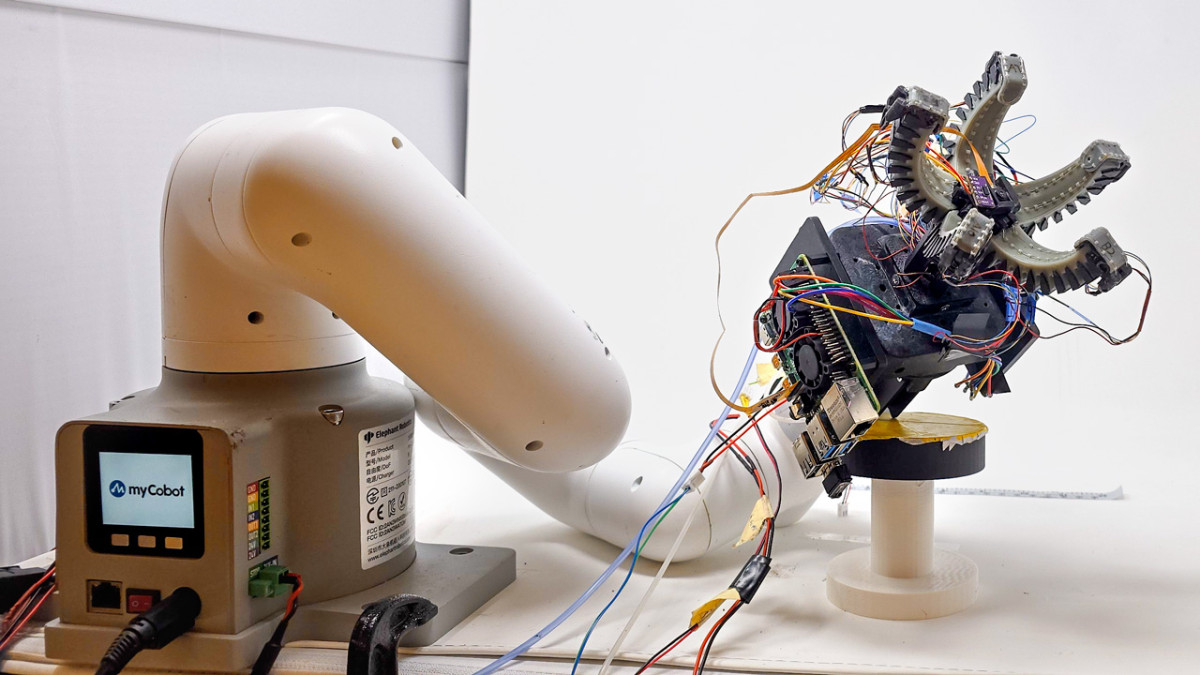
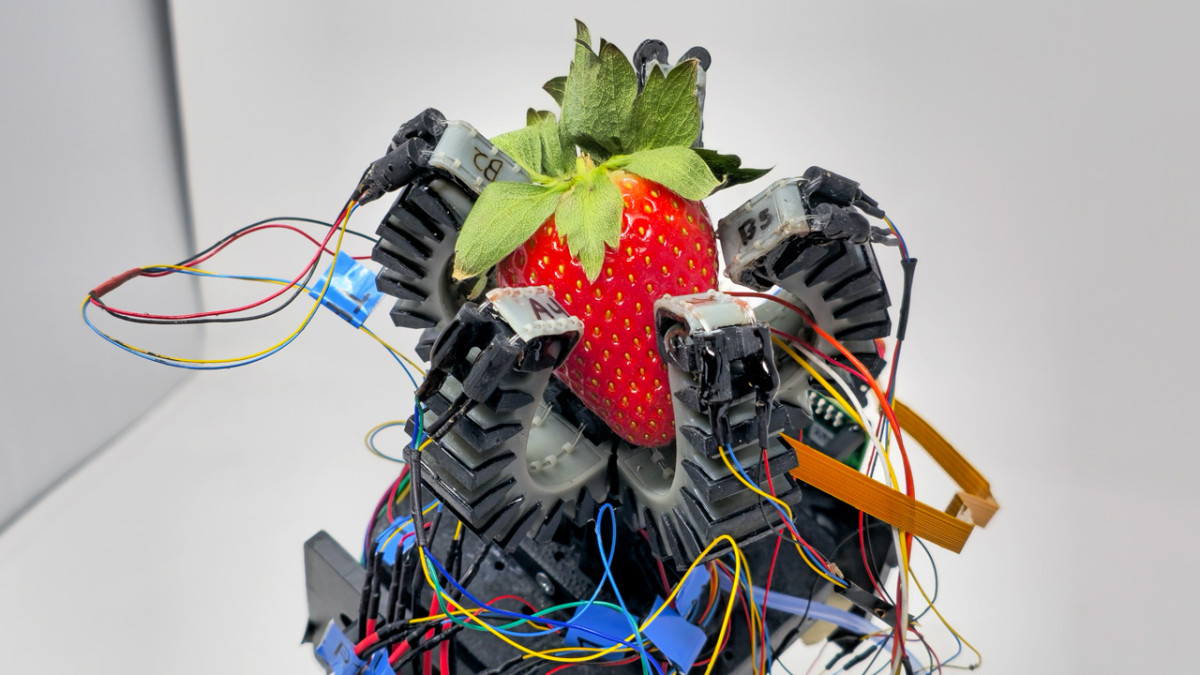
Cornell researchers used stretchable fiber-optic sensors to create a soft robot gripper that can predict the ripeness of strawberries by touch, then gently twist them off their branch or vine without causing any damage.
The technology, developed in the lab of Rob Shepherd, the John F. Carr Professor of Mechanical Engineering in the Cornell Duffield College of Engineering, could lead to more resilient and ecological food production and increase the availability of fruit species that are difficult to cultivate.
Provided/Anand Mishra
Caption: Cornell researchers used stretchable fiber-optic sensors to create a soft robot gripper that can predict the ripeness of strawberries by touch.
The research published March 23 in Nature Communications. The lead author is former postdoctoral researcher Anand Mishra.
Shepherd's Organic Robotics Lab previously demonstrated the potential of stretchable fiber-optic sensors to give soft robotic systems the ability to feel the same dynamic, tactile sensations that enable humans to navigate the natural world. In recent years, the team has expanded into agriculture, designing a soft robotic gripper that injects living plant leaves with sensors that help it detect and communicate with its environment.
"The great thing about Cornell is we're a really great agriculture school, and a lot of avenues are opening up because of it," Shepherd said. "It really allows us to uniquely combine our robotics expertise with our agricultural prominence."
To develop a way to evaluate and handle fruit with care, Shepherd's team partnered with Marvin Pritts, professor of horticulture and global development in the College of Agriculture and Life Sciences, who specializes in developing sustainable production methods for berry crops.
In order to train and test their gripper, they needed a model fruit. And for that, they turned to the strawberry.
"You can accurately tell when strawberries are ripe by their color," Shepherd said. "So we could train our model to know if it's ripe based on touch, then validate our model by looking at the color. And Anand was able to accurately estimate whether it was the right time to pick strawberries based off of the stiffness he measured."
The soft robot gripper has an equally soft touch. The gripper is equipped with two different fiber-optic sensors, one to measure the curvature of the finger, and the other to measure the pressure at the fingertip. This way the robot can estimate the shape of an object and adjust its grip accordingly to grasp the ripe fruit without bruising it.
"The fiber-optic strain gauges have the same mechanical properties as the grippers that are using them. So it's kind of like the flesh feels the fruit, rather than having separate sensors," Shepherd said.
The researchers also included a planetary gear mechanism so, once the fruit is grasped, the robot wrist can rotate and twist the strawberry off its vine, instead of pulling or plucking it, which can strain and damage the fruit.
This soft-gripping technology, developed in the Organic Robotics Lab, could lead to more resilient and ecological food production and increase the availability of fruit species that are difficult to cultivate.
For cases in which touch isn't enough, the researchers installed a camera in the gripper's palm to find fruit that are occluded by leaves or other vegetation. However, the device will be particularly handy when ripeness can't be detected visually, such as for avocadoes, pineapples or - Shepherd's favorite - pawpaws.
"The problem with pawpaws is you can't see when they're ripe, and they ripen so fast that if you're not there at the right time, you just miss them," he said. "And you can't harvest and ship them, because they don't survive shipping very well, either. That's one reason we don't have pawpaws in grocery stores. But this can help with that."
The technology could have an even greater impact on sustainable farming practices.
"Robots will allow us to do things we cannot do economically right now. We have row crops because row crops fit our machines. But if we have a larger amount of smaller robots, we can have mixed cropping of different species that support each other," Shepherd said. "Instead of having soy one year and corn the next, you can have them both. Or you could have interspersed species that are resistant to pestilence, that help block infestations and reduce the amount of pesticides and fertilizer. You can have drought resistance from canopy species.
"It's very complicated to manage a farm that way," he said, "and robots could allow us to do that."
Co-authors include Pritts, Aravind Ramaswami '25, Vikram Shree, Ph.D. '22, former postdoctoral researcher Mehmet Mert Ilman and postdoctoral researcher Khoi Ly.
The research was supported by the National Science Foundation Center for Research on Programmable Plant Systems (CROPPS) and the Cornell Institute for Digital Agriculture.





