EPFL scientists have invented a technique to navigate electronic devices that are smaller than human hair inside blood vessels and reach arterioles. The next step will be conducting in vivo tests.
The cardiovascular system is astonishing. It uses the blood that circulates in our veins and arteries to transport oxygen and nutrients to every tissue in the body. At EPFL, Lucio Pancaldi, a PhD student, and Selman Sakar, an assistant professor, have decided to harness hydrokinetic energy (mechanical energy resulting from the motion of liquids) to get to places in the human body without resorting to invasive methods. "Large proportions of the brain remain inaccessible because the existing tools are unwieldy, and exploring the tiny, intricate cerebral vascular system without causing tissue damage is extremely difficult" says Sakar.
Miniaturizing endovascular devices
Doctors can access patients' arteries by pushing and rotating guidewires, and later sliding hollow tubes called catheters. However, when arteries begin to narrow, especially in the brain, this advancement technique reveals its limits. Scientists at EPFL's MicroBioRobotic Systems (MICROBS) Laboratory, working with colleagues from Prof. Diego Ghezzi's group, engineered tethered microscopic devices that could be introduced into capillaries with unprecedented speed and ease. "Our technology is not intended to replace conventional catheters, but to augment them", says Pancaldi.
Fishing for answers
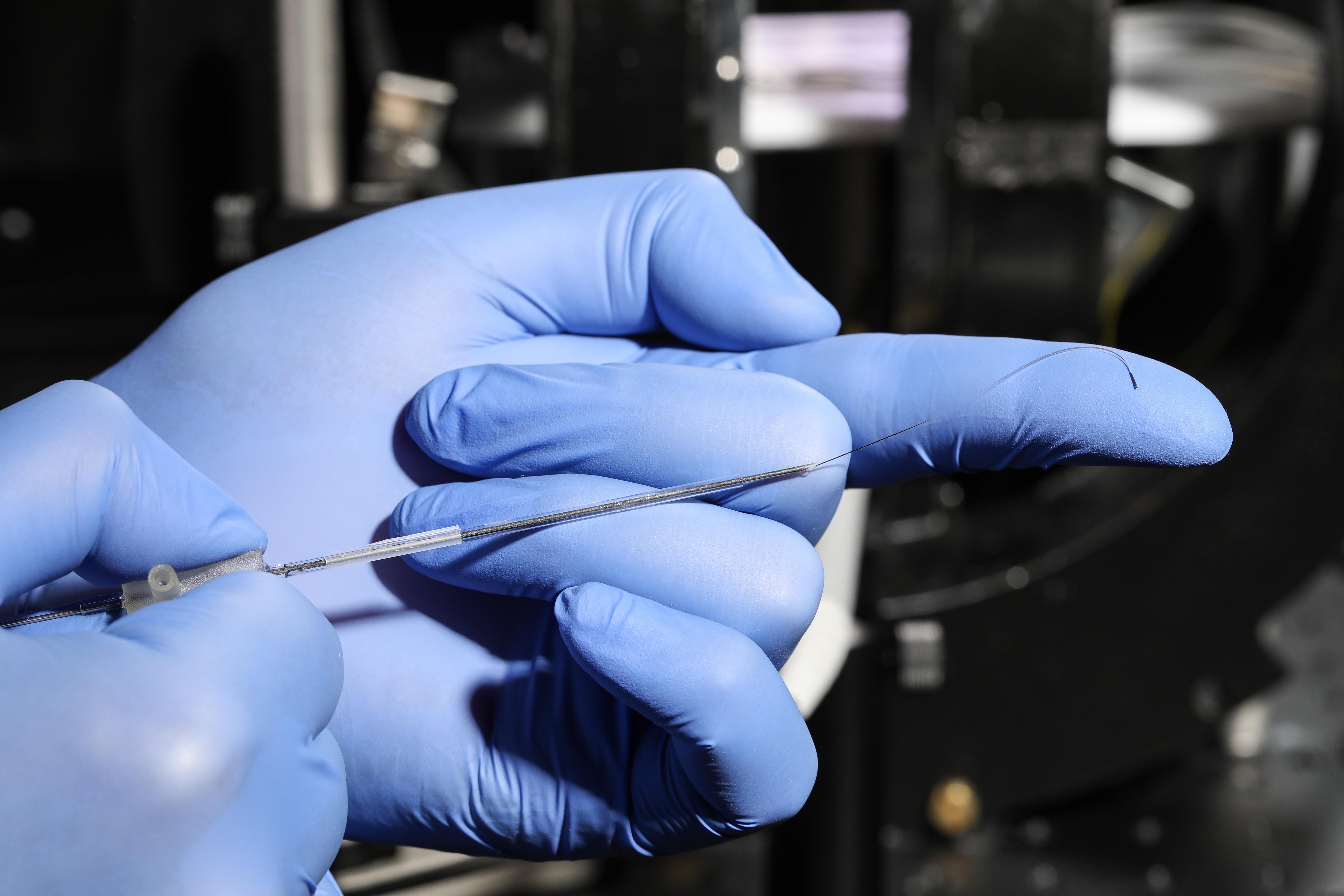
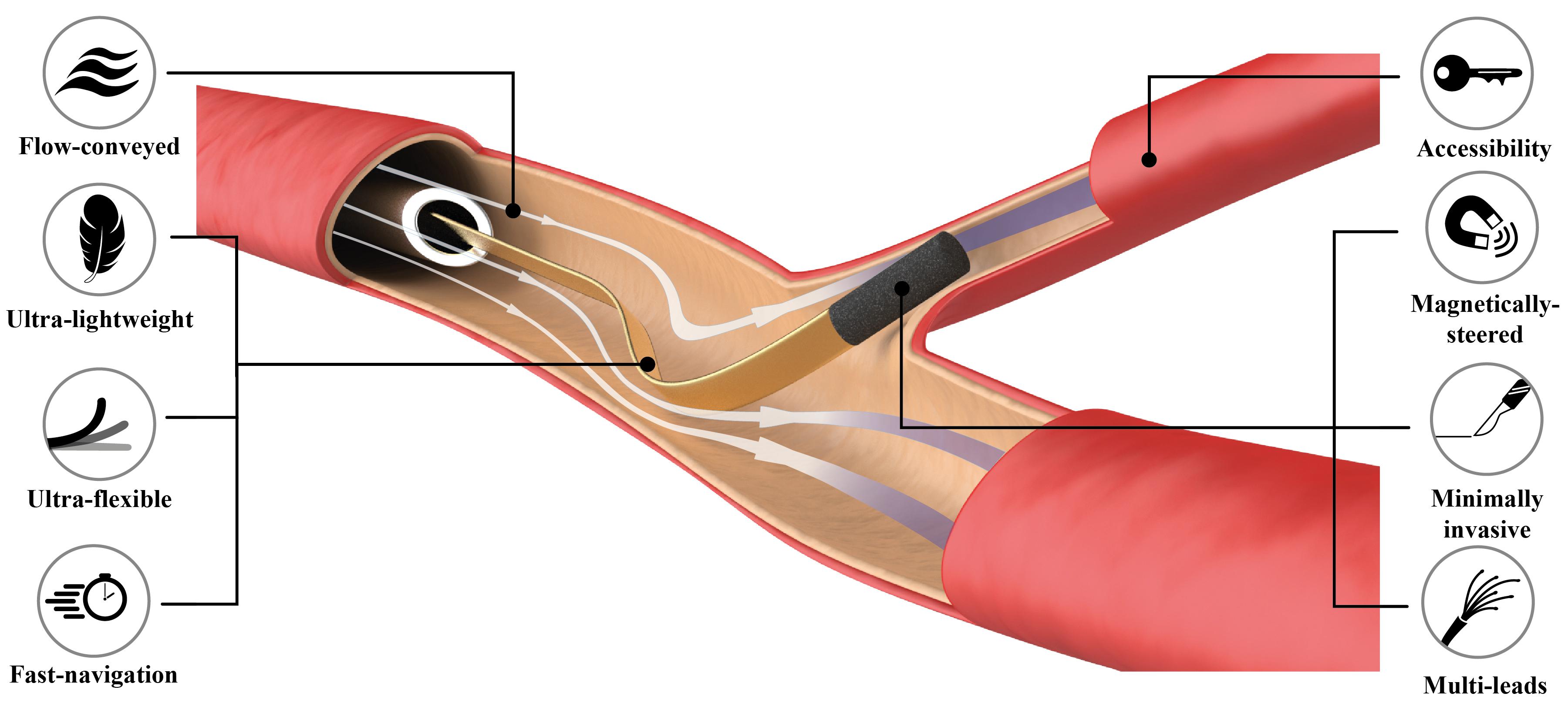
The devices consist of a magnetic tip and an ultraflexible body made of biocompatible polymers. "Imagine a fishhook gradually released into a river. It will get carried along by the current. We simply hold onto one end of the device and let the blood drag it to the most peripheral tissues. We gently rotate the magnetic tip of the device at bifurcations for choosing a specific path", says Pancaldi. Since no mechanical force is applied directly at the vessel wall, the risk of causing any damage is very low. Moreover, harnessing blood flow could reduce the operation time from several hours to a couple of minutes.
Charting a course through the vascular system
Both the release of the device and magnetic steering are under computer control. Furthermore, there is no need for force feedback as the tip of the device does not push against the vessel walls. "We can envision that a surgical robot will use the detailed map of the vasculature provided by the MRI and CT scans of the patient to autonomously guide devices to target locations. The addition of machine intelligence would transform endovascular operations. Alternatively, a computer program may use the visual information provided by the fluoroscope to localize the device and calculate a trajectory in real-time to facilitate manual operations", says Sakar.
Researchers at EPFL's School of Engineering tested the device inside artificial microvasculature systems. The next phase will involve tests on animals with state-of-the-art medical imaging systems. Scientists are also hoping to develop other devices with a range of on-board actuators and sensors.





